

MBD (Multibody Dynamics): là một dạng bài toán rất thông dụng, dùng để nghiên cứu động lực và động lực học của các hệ thống dưới tác động của ngoại lực, các kết quả mô phỏng chuyển động được trực quan hóa bằng cách sử dụng hình ảnh động và đồ thị về vận tốc, gia tốc của hệ thống chuyển động như: Oto, bus, máy bay, robot, máy móc công nghiệp… Sự kết hợp của Altair® MotionView và MotionSolve cung cấp giải pháp hoàn chỉnh từ xây dựng mô hình, tính toán và xem kết quả một cách dễ dàng.
Trong thực tế, muốn sản xuất một sản phẩm như: Oto, Robot, Drone,máy móc công nghiệp, hệ thống cơ khí… thông thường chúng ta cần tạo ra sản phẩm thật từ thiết kế tới chế tạo, sau đó mang sản phẩm đi kiểm tra thử nghiệm thực tế, việc này là cần thiết nhưng nó lại tốn rất nhiều thời gian và chi phí sản xuất.

Những năm gần lại đây với sự phát triển mạnh mẽ của các phần mềm mô phỏng CAE đặc biệt là phần mềm mô phỏng về hệ thống MBD giúp cho các tập đoàn lớn trên thế giới giảm rất nhiều thời gian cũng như chi phí R&D và thử nghiệm sản phẩm so với phương pháp truyền thống.
Trong bài viết này mình sẽ giới thiệu với mọi người về bộ sản phẩm HyperWorks của hãng Altair egineering.
Có 3 module chính phục vụ cho Multi-Body Simulation:
– MotionView: Môi trường trực quan để xây dựng mô hình MBD. Đây là công cụ chuyên dụng, có thể dùng để xây dựng các mô hình từ đơn giản tới phức tạp. Ngoài ra còn có rất nhiều thư viện mở rộng và các công cụ toán học kèm theo. Cùng với đó là khả năng tùy biến cực cao để đáp ứng những nhu cầu riêng của từng người dùng.
– MotionSolve: Bộ giải mạnh mẽ cho bài toán MBD. Mô hình sau khi được hoàn thiện với MotionView sẽ tự động chuyển đổi thành các hệ phương trình toán học và được giải với Motion Solve. Kết quả trả ra từ bộ giải này có thể được hiển thị bằng các công cụ Post processing khác trong bộ sản phầm HyperWorks (HyperView, HyperGraph).
– Inspire Motion: Phiên bản nhanh-gọn-trực quan cho các bài toán Multi-Body Simulation đơn giản. Inspire Motion có thể được coi là phiên bản rút gọn của MV/MS với giao diện hiện đại hơn rất nhiều. Module này dễ sử dụng hơn rất nhiều và chuyên dành cho những hệ MBD đơn giản.
Lợi ích:
- Xây dựng mô hình đa cơ hệ một cách nhanh chóng và trực quan.
- Giảm thời gian xây dựng mô hình thực tế tốn rất nhiều thời gian, chi phí rất nhiều.
- Các kết quả mô phỏng thể hiện cái nhìn sâu sắc và đưa ra các quyết định thiết kế sáng suốt
- Dễ dàng tham số hóa mô hình của bạn để cho phép khám phá và tối ưu hóa thiết kế tự động.
- Tận dụng các thư viện mô hình tích hợp sẵn hoặc tạo cho riêng bạn.
- Chuẩn hóa và chia sẻ các hệ thống con và mô hình hệ thống.
- Cải thiện độ bền của sản phẩm bằng cách quét qua các điều kiện hoạt động trên phạm vi rộng và bằng cách giảm thiểu tác động của các biến thể sản xuất.
- Kết hợp với FEA: Nhập các cơ quan linh hoạt; xuất tải.
- Kết hợp với CFD: Nhập tải trọng khí động học hoặc tải trọng do chất lỏng gây ra.
- Kết hợp với các công cụ mô phỏng sơ đồ khối 1D, thông qua đồng mô phỏng, để mô phỏng hệ thống đa ngành.
- Tự động hóa các quy trình trong công ty giúp tránh những sai lầm thủ công.

Môi trường mô hình hóa mạnh mẽ và hiệu quả
Một hệ thống cơ khí điển hình có xu hướng có một số hệ thống con. Cách tiếp cận mô-đun để xây dựng mô hình cho phép người dùng có nhiều quyền kiểm soát hơn đối với việc xây dựng mô hình. Môi trường mạnh mẽ của MotionView chứa đựng nhiều khả năng cốt lõi được thiết kế để đơn giản hóa và hợp lý hóa việc tạo ra các mô hình cơ học phức tạp được yêu cầu để giải quyết các vấn đề khó khăn nhất.

Các định nghĩa mô hình tham số cung cấp các nghiên cứu phân tích dễ dàng về các biến thể của mô hình.
GUI hiện đại dễ sử dụng
Bố cục trực quan và quy trình làm việc hợp lý của MotionView cho phép cả các kỹ sư có kinh nghiệm và người mới bắt đầu nhanh chóng để xây dựng và phân tích các hệ thống đa cơ quan một cách nhanh chóng.
Quy trình làm việc hiệu quả và trực quan đơn giản hóa và tiêu chuẩn hóa mô hình hóa hệ thống cơ khí.
Giao diện người dùng hiện đại dễ học và sử dụng.
Trình duyệt mô hình nâng cao, nhạy cảm với ngữ cảnh giúp dễ dàng điều hướng qua các phần tử mô hình với ít di chuyển chuột hơn và ít nhấp chuột hơn.
Mô hình hóa phần các cơ cấu flexbody hiệu quả
Mô hình hóa phần các cơ cấu flexbody trong một hệ thống cơ khí là một nhiệm vụ phức tạp và đầy thách thức vì nó thường đòi hỏi sự quen thuộc với mô hình phần tử hữu hạn và kiến thức về bộ giải phần tử hữu hạn. Các quy trình tạo mô hình flexbody của MotionView được phát triển để vượt qua những thách thức này trong khi vẫn cung cấp các công cụ tiên tiến và dễ sử dụng để tạo flexbody, tích hợp hệ thống và xử lý hậu kỳ.

Các quy trình trơn tru và đơn giản hóa để tạo cơ cấu flexbody
Chuyển đổi một bước giữa các thành phần cứng và flexbody
Một loạt các tiện ích toàn diện để giảm thiểu các lỗi xử lý flexbody
Tự động hóa và Tùy chỉnh
MotionView hoàn toàn tùy chỉnh và sẵn sàng tự động hóa cho phép người dùng kiểm soát cả giao diện người dùng đồ họa và các quy trình mô hình hóa. Điều này cho phép MotionView hoàn toàn phù hợp trong bất kỳ môi trường mô phỏng.
Giao diện người dùng hoàn toàn có thể tùy chỉnh cung cấp cho người dùng sự linh hoạt để sửa đổi môi trường hiện có, bật và tắt bảng điều khiển và xây dựng bảng điều khiển tùy chỉnh.
Tập lệnh mạnh mẽ cho phép người dùng tự động hóa các tác vụ lập mô hình lặp đi lặp lại và hợp lý hóa các quy trình phức tạp.
Các công cụ mô hình hóa trong MotionSolve – MotionView bao gồm:
– Liên kết cứng phần tử 2D và 3D
– Mô hình hóa các vật thể liên kết linh hoạt dạng tuyến tính và phi tuyến
– Mô hình hóa các ràng buộc từ cấp độ thấp đến cao hơn
– Liên kết các loại lực tuyến tính và phi tuyến
– Tạo ra các chi tiết liên kết dạng 2D, 3D dựa trên cơ sở hình học CAD
– Tại liên kết giữa các đường cong và các bề mặt
– Xác định lực ma sát, dung sai giới hạn
– Chuyển động đầu vào
– Thiết lập các phương trình chuyển động và ma trận trạng thái
– Mô phỏng các sensor cảm biến
Có thể thấy với các tính năng nổi bật giải pháp MotionSolve – MotionView giúp cho người dùng giả quyết các bài toán thực tế một cách mạnh mẽ và hiệu quả.
Ứng dụng
Giải pháp phân tích động lực học, độ bền, phân tích tiếng ồn, rung động và độ cứng vững trong ngành công nghiệp ô tô
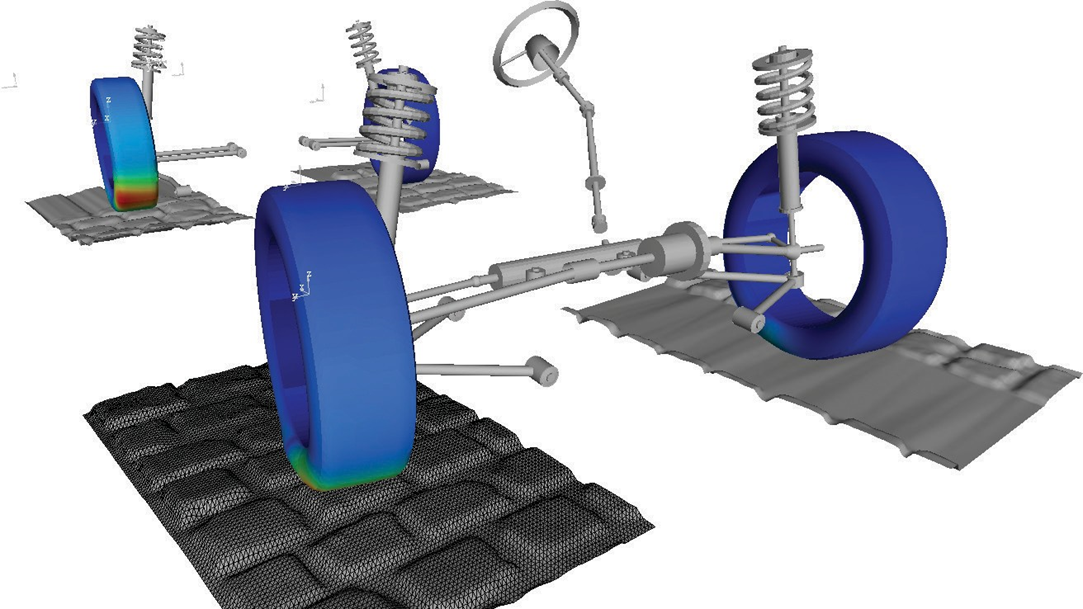
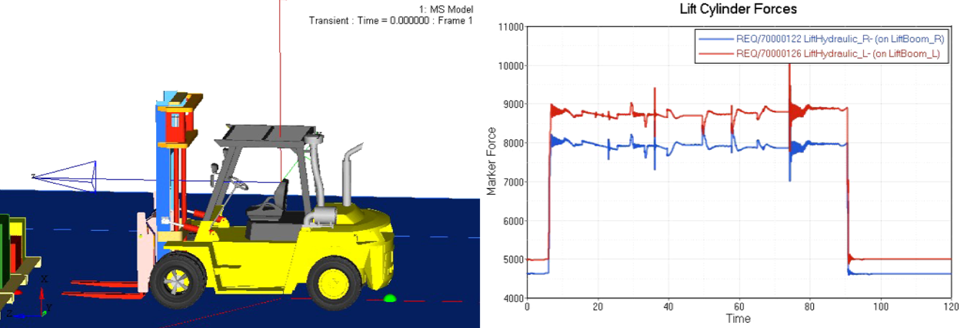
MotionSolve cung cấp giải pháp toàn diện cho ngành ô tô để mô tả đầy đủ các thông số và số liệu cần thiết. MotionSolve chứa một thư viện đầy đủ các thành phần của xe giúp bạn xây dựng được một hệ thống. Với sự hỗ trợ của TNO Delft-Tyre, FTire, CD Tyre và OpenCRG, MotionSolve sẽ cung cấp các mô hình về lốp xe và hệ đường tương ứng với các ứng dụng mô phỏng của bạn. Các định dạng mẫu cho các hệ thống con như hệ thống treo, hệ thống lái và lò xo là có sẵn. MotiognSolve sẽ giúp bạn từng bước nhanh chóng lắp ráp một chiếc xe hơi hoặc xe tải. Với giao diện người dùng thân thiện cho phép bạn xác định và định nghĩa các trạng thái tĩnh, trạng thái động hoặc trạng thái ổn định của xe. Tự động tạo ra các báo cáo cho phép bạn nhanh chóng đánh giá hiệu suất của hệ thống. Với những tính năng cốt lõi này bạn có thể thưc hiện thiết kế, phân tích hệ thống treo của xe, đánh giá chuyển động của xe, hoạt động của bộ điều khiển, tiến hành mô phỏng chạy trên quãng đường ảo để đánh giá độ bền, nghiên cứu tiếng ồn, rung động và độ cứng vững (NVH) của xe.
Giải pháp tổng quát cho các hệ thống máy móc và cơ học
Cơ học được ứng dụng trong tất cả các ngành. MotionSolve cung cấp các tính năng liên kết toàn diện cho phép bạn nhanh chóng xây dựng và phân tích chính xác các hệ thống phức tạp, các hệ thống có thể chứa tới hàng ngàn các liên kết khác nhau. Với MotionSolve bạn có thể tạo ra thư viện các thành phần tham số khác nhau, những định dạng mẫu cho các hệ thống và sử dụng các thuật ngữ để xây dựng mô hình và chạy các mô phỏng.

1D – Giải pháp điều khiển và mô phỏng hệ thống cơ điện tử
MotionSolve cung cấp các tính năng tiên tiến tích hợp mô phỏng các phần tử 1D và phần mềm điều khiển giúp bạn có thể tái sử dụng lại các mô hình MotionSolve đã được kiểm chứng.
Ở giai đoạn đầu của quá trình thiết kế bạn có thể nhập các mô hình đa chi tiết từ MotionSolve dưới dạng ma trận tuyến tính vào các gói điều khiển của bạn và thực hiện thiết kế các hệ thống điều khiển.
Sau đó trong giai đoạn đánh giá bạn có thể nhập các mô hình MotionSolve độ trung thực cao vào Matlab Simulink hoặc SolidThinking Activate để đánh giá bộ điều khiển. Trong mối trường điều khiển bạn kết nối các hệ thống để chúng có thể trao đổi tín hiệu trong thời gian chạy bài toán mô phỏng.Sau đó bạn chạy mô phỏng toàn bộ hệ thống để đánh giá hiệu quả của hệ thống. Ngoài ra MotionSolve có thể nhập các mã Coder C do người dùng xác định các chương trình con và thực hiện các mô phỏng tương tự.
MotionSolve hỗ trợ các giao thức FMI/FMU 2.0 để bạn có thể gộp nhiều mô hình đã được phát triển ở nơi khác.
Tóm tắt lại, MotionView cung cấp giải pháp hoàn chỉnh cho toàn bộ quá trình mô phỏng hệ thống đa hệ thông qua chức năng mạnh mẽ và tích hợp trực tiếp với Altair® HyperWorks®.
Xây dựng mô hình đa vật lý với MotionView và Altair® HyperMesh®
Phân tích và tương quan các kết quả mô phỏng và kiểm tra dữ liệu với khả năng hiển thị dữ liệu hiện đại thông qua Altair® HyperView® và Altair® HyperGraph®
Thực hiện phân tích cơ thể uốn cong
Xuất các tải trọng thành phần, hỗ trợ một số định dạng FE và mỏi khác nhau, từ các mô phỏng đa cơ hệ với Tiện ích xuất tải trọng.
Hỗ trợ nhiều bộ giải của MotionView bao gồm MotionSolve, ADAMS, RADIOSS và ABAQUS
Thực hiện các nghiên cứu DOE, tối ưu hóa và ngẫu nhiên thông qua Altair® HyperStudy® và Altair® OptiStruct®



0 Nhận xét